Bauanleitung für einen starken Quadcopter – Teil 2 – Rahmen montieren und Elektronik einbauen
Feb. 3Nachdem der Drucker nunmehr alle Teile ausgespuckt und der Zoll die Bestellung vom Hobbyking freigegeben hat, kann es nun an die Montage gehen.Es sollten diese Rahmenteile vorliegen:
– Platte unten (die mit den Ösen und der Servohalterung)
– Platte oben
– Vier Arme (ggf. plus vier Füße)
– Gehäuse für HKpilot (zwei Teile)
– Gehäuse für GPS (zwei Teile)
Rahmen montieren
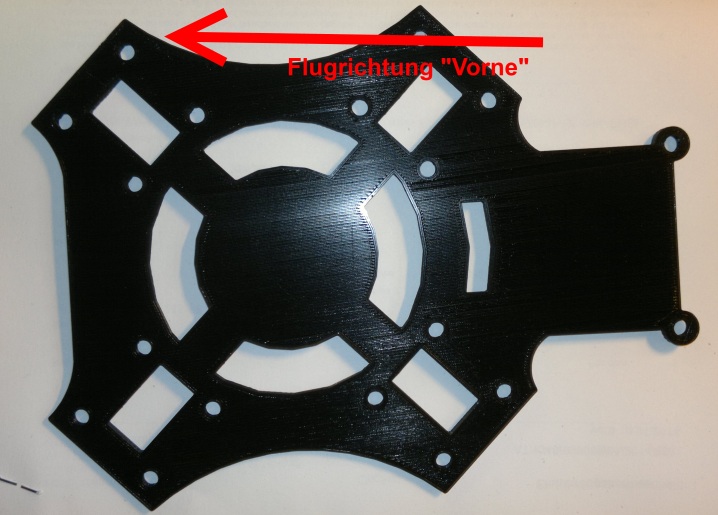
Als Flugrichtung „nach vorne“ habe ich die Seite festgelegt, wo später irgendwann die Kamera befestigt wird. Also ist „hinten“ bzw. „rückwärts“ die Seite der Platten, die die rechteckigen Elemente enthält:
Die Montage ist ganz simpel. Untere Platte auf den Tisch legen (Servohalterung zeigt nach unten!), Arme auf die jeweiligen Löcher ausrichten, obere Platte auflegen und mit jeweils zwei der M4x50 Schrauben durch die beiden äußeren Löcher befestigen. Unter die Mutter eine Scheibe legen:


Elektronik vorbereiten
Auf dem HKpilot JP1 entfernen und gut aufheben, da wir bis auf die Servos alles mit dem Power Module versorgen sollte der offen sein. Dann ins Gehäuse einbauen. Dabei darauf achten, dass die Eingänge (Input) nach vorne, also in Flugrichtung zeigen werden. In das kleine „Kästchen“ im Gehäuse sollte man etwas Watte, Schaumgummi oder ähnliches stecken, damit der Drucksensor etwas abgedeckt ist. Das Gehäuse einfach mit ein paar Kabelbindern zuziehen. Anschließend das GPS ins Gehäuse einbauen, damit es nicht so drinnen herumklappert, einen Tropfen Heisskleber nehmen und die beiden Platinen sichern. Die Antenne muss logischer Weise nach oben Zeigen 🙂 Das Gehäuse kann mit Heisskleber oder ein paar Tropfen Sekundenkleber verschlossen werden.
Der HK Pilot wird nun schon einmal mit den Empfängerkabeln bestückt. 5 Stück lagen der Turnigy 9x bei, also die Eingänge 1-5 dafür verwenden. Masse (schwarzes Kabel) zeigt dabei nach außen/vorne. Wenn ihr die Turnigy 9x auf openTX umflasht, könnt ihr die Kanäle am Sender frei belegen. Wenn ihr das nicht vorhabt (wieso auch immer, lohnt sich aber!), dann müsst ihr die Inputs ggf. später nochmal tauschen, damit alles passt.
Danach stellen wir den HKPilot erst mal zur Seite.
Motoren montieren
Nun geht es an die Montage der Motoren. Jeder Motor wird mit dem zugehörigen Accessory Pack für die Aufnahme der Propeller vorbereitet.
Danach das silberne Kreuz oben auf die Arme legen und zwar so, dass die Löcher passen 😉 Ich verwende das Kreuz in der Hoffnung, dass es ggf. entstehende Wärme der Motoren aufnehmen kann. Denn ab 40-50°C wird das PLA weich 😉 Außerdem wird so die Auflagefläche der Motoren vergrößert.
Anschließend werden von unten die M3x8 Schrauben reingedreht, bis sie gerade so oben wieder rausschauen. Dann den Motor aufsetzen. Wenn man von oben auf den Arm sieht, steht das Kabel auf 11 Uhr:

Dann vorsichtig von unten festschrauben. Achtung, nicht überdrehen! Nach fest kommt ab!
Alle Motoren sollten beim oben drauf schauen nun in derselben Position befestigt sein.
Controller montieren
Alsdann können die Motorcontroller (ESCs) befestigt werden. Je nach Geschmack kann das auf oder unter den Armen erfolgen, ich habe das unten drunter erledigt.
Beim Anschluss der Motoren an die Controller muss beachtet werden, dass zwei Motoren im und zwei gegen den Uhrzeigersinn drehen müssen. So werden die Drehmomente ausgeglichen und der Copter fliegt später stabil. Das kann man entweder über ein umflashen der ESCs erreichen (KK Multicopter Flashtool) oder ganz einfach über das vertauschen der schwarzen und gelben Anschlusskabel. Das Drehstrom-Wechselfeld ist dann nämlich einfach andersrum polarisiert und der Motor dreht in die andere Richtung. Welche Motoren müssen wie rum drehen? Dazu gibt es im Arducopter Wiki ein schönes Bild. Wir haben einen X-Frame, also müssen (wenn man von oben in Flugrichtung schaut) die Motoren 3 und 4 im Uhrzeigersinn drehen. Also bei diesen die gelben und schwarzen Anschlusskabel vertauschen. Wenn ihr das verwechselt ist nicht schlimm, das kann man später im Testlauf noch korrigieren. Dazu dann die Kabelbinder vlt. nicht ganz so fest ziehen 😉
Spannungsversorgung einbauen
Die Controller werden dann ganz einfach an das Quadcopter Power Distribution Board angeschlossen. Das legt man mit der gummierten Seite erstmal unten in den großen Zwischenraum rein und macht die Anschlüsse. Dabei auf richtige Polarität achten. Wenn man von oben in Flugrichtung draufschaut, dann sollte der Eingang des Boards auf vier Uhr an der Seite liegen. Hier wird dann nämlich gleich das Power Module angeschlossen (ich habe es eingeschrumpft, damit nichts passiert) und auf dem Arm vorne rechts mit Kabelbinder fixiert. Man kann das Stromverteilerboard noch mit Kabelbindern auf der unteren Platte fixieren, es hält aber durch die ganzen Kabel auch so ganz gut. Man muss halt schauen ob es dann ohne Kabelfinder ggf. zu stark vibriert und sich etwas abscheuert.
Den DF13 Stecker des Power Modules führen wir hinten raus, da kommt später der HKpilot dran. Ebenso verfahren wir mit den Kabeln die von den Controllern kommen.
HKpilot, Empfänger und GPS einbauen
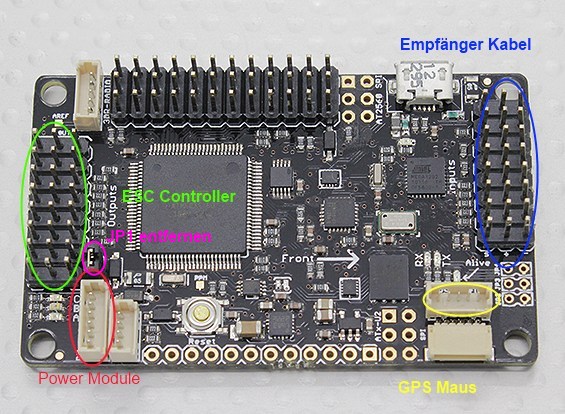
Jetzt wird alles an den HKpilot angeschlossen. Das DF13 Kabel vom Power Module unten links, die Kabel vom Empfänger rechts (schwarz ist Masse und ganz nach außen), die Kabel von den ESCs/Motor Controllern links (braun ist Masse und wieder nach außen). Die GPS Maus wird mit dem DF13 rechts unten angeschlossen.
Hier eine Ansicht als Bild:
Der HKpilot im Gehäuse wird auf die Bodenplatte montiert und erstmal mit einem Kabelbinder fixiert. Die Kabel zum Empfänger werden durch das Loch in der oberen Platte geführt und mit dem Empfänger verbunden. Ebenso das dem Kabel der GPS Maus. Die Maus stellt man auf den Empfänger und zieht das ganze Paket mit einem Kabelbinder fest. So könnte das am Ende aussehen:

Die Antenne des Empfängers einfach unten mit einem Kabelfinder befestigen, damit sie nicht in die Propeller gerät.
Montage der Batterie
Bei den meisten Quadcoptern die man so sieht, ist die Batterie immer unter der Bodenplatte befestigt. Darüber kann man diskutieren. Ich finde die Vorstellung, dass sich bei einer Bruchlandung, wenn die Füße oder Arme brechen, die Batterie in den Boden bohrt, nicht so erbaulich 🙂
Daher montiere ich meine Batterie auf der oberen Platte. Von oben in Flugrichtung betrachtet, wird die Batterie mit den Anschlüssen nach links oben montiert. Einfach ein paar Kabelbinder durch die obere Platte und die Batterie sachte fixieren. Hier kann je nach Gusto noch etwas Mossgummi mit eingebaut werden, damit sich nichts abscheuert und die Batterie schön gedämpft ist. Mit der Positionierung der Batterie kann man auch den Schwerpunkt des Copters gut ausbalancieren! Hinten zu schwer? Dann Batterie weiter nach vorne schieben. Erklärt sich eigentlich von selbst.
Ganz vorne auf der oberen Platte machen wir dann noch den Lipowarner mit einem Kabelbinder fest.
Fertig
Wenn alles montiert und fürs Erste fixiert ist, sollte der Quadcopter ungefährt so aussehen (Achtung: Propeller habt ihr noch keine drauf!):

Im nächsten Kapitel folgt das Einrichten vom HKpilot mit dem Mission Planner, das kalibrieren der Funke und der Motoren.